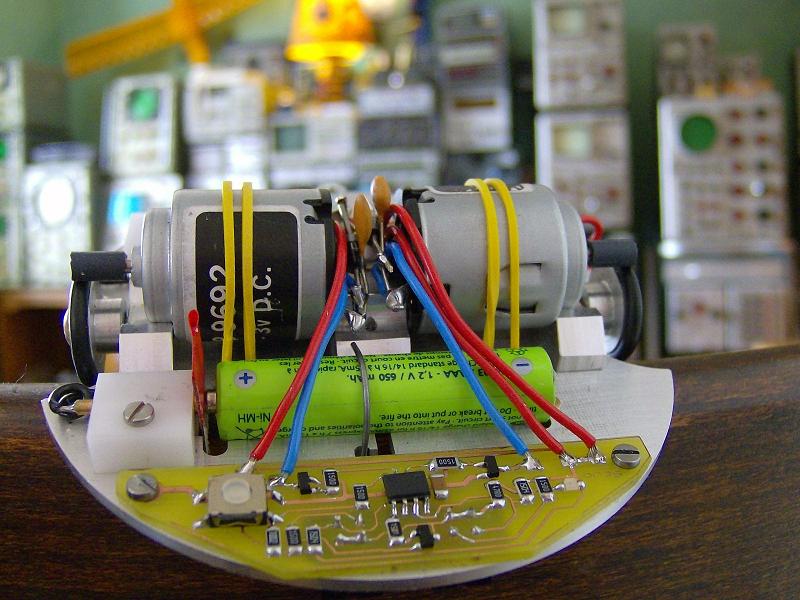
Tout petit robot
suiveur de lignes
|
Ce petit robot utilise 2 moteurs à courant continu commandés par un
PIC 12F675, via de simples transistors à jonction en technologie CMS. Ces deux
transistors ne sont pas protégés contre les surintensités (il y a juste une diode pour les
surtensions), et sont calculés au plus juste, mais ça tourne !!
(rien de grillé pour l'instant)...
Le but est tout simplement de suivre une ligne réalisée à l'aide
d'un ruban adhésif noir, sur une feuille blanche : c'est un classique !!
Pour cela, le robot utilise deux capteurs à réflexion placés à l'avant :
si le capteur droit voit du blanc, il fait marcher le moteur droit, et
pareil pour le capteur gauche, avec le moteur gauche.
|
Schéma
théorique
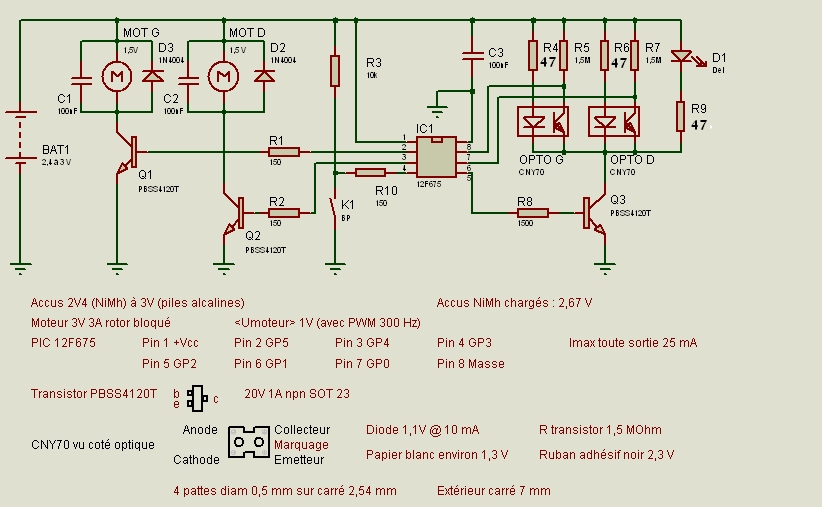
Liste des composants
BILL OF MATERIALS (Default)
===========================
Design: Robot suiveur de lignes
Doc. no.:
Revision:
Author: d.B
Created: 04/10/06
Modified: 23/10/06
Partslist generated OK.
QTY PART-REFS VALUE
--- --------- -----
Resistors
---------
5 R1,R2,R10 150
1 R3 10k
2 R5,R7 1,5M
1 R8 1500
1 R4,R6,R9 47
Capacitors
----------
3 C1,C2,C3 100nF
Transistors
-----------
3 Q1,Q2,Q3 PBSS4120T
Diodes
------
1 D1 Del
2 D2,D3 1N4004
Miscellaneous
-------------
1 BAT1 2,4 à 3 V
1 IC1 12F675
1 K1 BP
1 MOT D 1,5 V
1 MOT G 1,5V
2 OPTO D,OPTO G CNY70
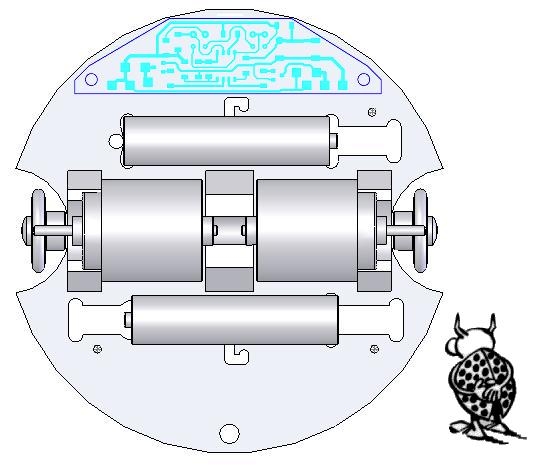
Détail du châssis
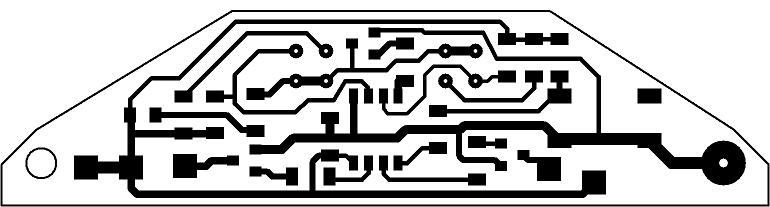
Allure du typon
Vue de dessus

Les copains rappliquent !!

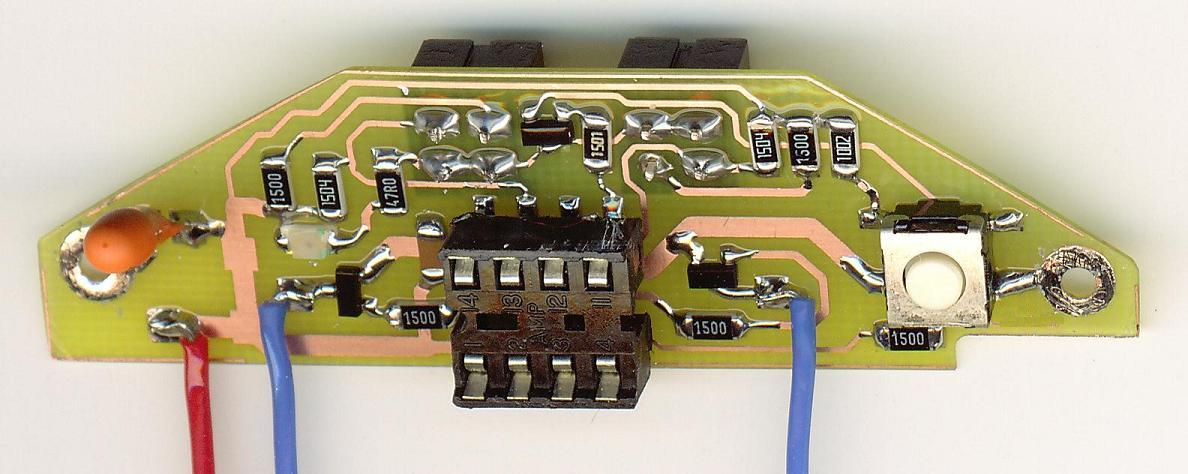
Gros plan du circuit imprimé
Fichier
source du PIC
;-----------------------------------------------------------------------------------------------
; Robot suiveur de ligne
; dB
; PIC12F675 CMS
; Horloge interne 4 Mhz
; Version alu avec roues !!
; 12/09/2006
; 22/10/2006
; 10/12/2006
;
; Nouvelle version
;
; - arrêt moteurs et attente pendant KOFF (fin des parasites)
; - mesure éclairement et comparaison à Kseuil
; - marche moteurs pendant KON
; - etc jusqu'à l'arrêt défini par Kdodo
; - BP utilisé en reset
;
;-----------------------------------------------------------------------------------------------
;
; Alimenté sur 2 accumulateurs NiMh en série soit environ Vcc = 2,5 V
;
; Le robot suit une ligne noire en ruban adhésif de largeur 8 mm environ
; La ligne est tracée sur une feuille blanche
; Le capteur droit commande le moteur droit : si blanc marche, si noir arrêt
; Idem pour le capteur gauche, avec le moteur gauche
; Un capteur CNY70 délivre entre environ 2,1 V pour du noir et 1,1 V pour du blanc
; On place donc un seuil à 1,7 V soit 255*1,7/Vcc = 175
; Le mot du CAN 10 bits est 1023 pour Vcc
; On utilise uniquement l'octet de gauche (on néglige les LSB) cela donne une division par 4
; A la mise sous tension (mise en place des piles) le micro démarre et fait son boulot
; Après 60 s il se met en veille (consommation quasi nulle)
; Si on presse le BP il se réveille et recommence, etc ..
;
; Micro 12F675 E/S 25 mA
;
; Vdd [ ° ] Vss
; Moteur gauche GP5 [ ] GP0 capteur gauche
; Moteur droit GP4 [ ] GP1 capteur droit
; Bouton pouss GP3 [ ] GP2 activation des capteurs
;
; Constantes
#define Kseuil 165 ; plus le seuil est élévé, et plus le robot voit du blanc partout
#define KON 10 ; temps de validation des moteurs
#define KOFF 25 ; temps d'arrêt des moteurs
#define Kdodo 10 ; comptage nombre de boucles pour arrêt automatique
; Variables
TensionD equ 0X20 ; mesure tension droite
TensionG equ 0X21 ; mesure tension gauche
ImageES equ 0X22 ; image port sortie moteurs
ONOFF equ 0X23 ; cumul temps (marche ou arrêt)
Dod equ 0X24 ; pour calcul Dodo
Dodo equ 0X25 ; cumul temps fonctionnement robot
Boucle equ 0X26 ; diviseur par 256
ERRORLEVEL -302 ; Turn off bank bits warning
; Preprocessor Directives
; Using 12F675 processor, generating an Intel HEX file, using DECimal radix
LIST P=12F675, F=INHX8M, R=DEC
#INCLUDE
__CONFIG _INTRC_OSC_NOCLKOUT & _WDT_OFF& _PWRTE_OFF & _MCLRE_ON & _BODEN_OFF & _CP_OFF & _CPD_OFF
;-----------------------------------------------------------------------------------------------
ORG 0x0000
goto Start
ORG 0x0004
goto Start
ORG 0x0005
Start
banksel OSCCAL ; BANK1
call 3FFh ; Retrieve Factory Calibration Value
movwf OSCCAL ; Load OSCCAL
banksel GPIO
clrf GPIO
banksel CMCON
movlw 07h ;Turn Off comparator
movwf CMCON
banksel ANSEL
movlw b'01100011' ; AD clock Fosc/64 et Entrée analogique = GP0 et GP1
movwf ANSEL
banksel VRCON
clrf VRCON ;Turn Off VREF
banksel INTCON
movlw b'11001000'
movwf INTCON
banksel IOC
movlw b'00001000'
movwf IOC
banksel TRISIO
movlw b'00001011' ; GPI0 GPI1 GPI3 en entrée GPI2 GPI4 GPI5 en sortie
movwf TRISIO
banksel OPTION_REG ;BANK 1
movlw b'11001000' ;Pull Ups Desabled, Rising Edge, Assigned to WDT , Prescaler is 1:1 WDT
movwf OPTION_REG
banksel WPU
clrf WPU ;Pullup Desabled
clrf TensionD
clrf TensionG
clrf ImageES
clrf ONOFF
clrf Dod
clrf Dodo
clrf Boucle
;-----------------------------------------------------------------------------------------------
Principal
call attente ; on arrête tout pour stopper les parasites
call mesureg ; mesure tension gauche
call mesured ; mesure tension droite
call moteurs ; mise en marche ou non des moteurs
goto Principal
;----------------------------------- stopper les parasites des moteurs ---------------------
attente
banksel ImageES ; on arrête les moteurs et on laisse les capteurs en marche
movlw b'00000100'
movwf ImageES
banksel GPIO
movwf GPIO
banksel Boucle ; et on attend pendant KOFF
clrf Boucle
clrf ONOFF
attent1
incfsz Boucle,1
goto attent1
incf ONOFF,1
movf ONOFF,W
sublw KOFF
bnz attent1
return
;----------------------------------- mesure tension gauche -----------------------------------
mesureg
banksel ADCON0
movlw b'00000001' ; b7 à 0 : résultat CAN justifié à gauche : octet haut = 8 bits fort conversion, octet bas négligé
; b6 à 0 : référence = Vcc
; b5 à 0 : NU
; b4 à 0 : NU
; b3 à 0 : sélection entrée AN0 (= GP0 = broche 7)
; b2 à 0 : idem
; b1 à 0 : pas de demande de conversion
; b0 à 1 : validation du CAN
movwf ADCON0
banksel ADCON0
bsf ADCON0,1 ; lance la conversion
adconverg
btfss PIR1,6 ; teste si la conversion est finie
goto adconverg ; si pas finie on reteste
bcf PIR1,6 ; on efface le flag
bcf INTCON,2 ; on efface le flag TOIF
movf ADRESH, W ; on transfère le résultat de l'adc dans W
movwf TensionG
finconverg
return
;----------------------------------- mesure tension droite -----------------------------------
mesured
banksel ADCON0
movlw b'00000101' ; b7 à 0 : résultat CAN justifié à gauche : octet haut = 8 bits fort conversion, octet bas négligé
; b6 à 0 : référence = Vcc
; b5 à 0 : NU
; b4 à 0 : NU
; b3 à 0 : sélection entrée AN1 (= GP1 = broche 6)
; b2 à 1 : idem
; b1 à 0 : pas de demande de conversion
; b0 à 1 : validation du CAN
movwf ADCON0
banksel ADCON0
bsf ADCON0,1 ; lance la conversion
adconverd
btfss PIR1,6 ; teste si la conversion est finie
goto adconverd ; si pas finie on reteste
bcf PIR1,6 ; on efface le flag
bcf INTCON,2 ; on efface le flag TOIF
movf ADRESH, W ; on transfère le résultat de l'adc dans W
movwf TensionD
finconverd
return
;-------------------------- Commande des moteurs ---------------------------------------------
moteurs
banksel ImageES
movlw b'00000100'
movwf ImageES
movf TensionD,W ; on charge W
sublw Kseuil ; opération Kseuil - TensionD
bnc suita ; si borrow (TensionD > Kseuil) on saute
bsf ImageES,4 ; Marche moteur D
suita
movf TensionG,W ; on charge W
sublw Kseuil ; opération Kseuil - TensionG
bnc suitb ; si borrow (TensionG > Kseuil) on saute
bsf ImageES,5 ; Marche moteur G
suitb
movf ImageES,W
banksel GPIO
movwf GPIO
banksel Boucle ; attente pendant KON
clrf Boucle
clrf ONOFF
suitc
incfsz Boucle,1
goto suitc
incf ONOFF,1
movf ONOFF,W
sublw KON
bnz suitc
incfsz Dod,1 ; on regarde s'il est l'heure de faire dodo
goto suitd
incf Dodo,1
suitd
movf Dodo,W
sublw Kdodo
bnz suite
clrf ImageES ; Si dodo
movf ImageES,W ; alors on arrête moteurs et capteurs
banksel GPIO
movwf GPIO
bcf INTCON,0
sleep ; et on fait dodo (réveil par Reset donc rien à préparer)
suite
return ; on sort
;--------------------------------------------- fin ---------------------------------------------
end
;-----------------------------------------------------------------------------------------------
